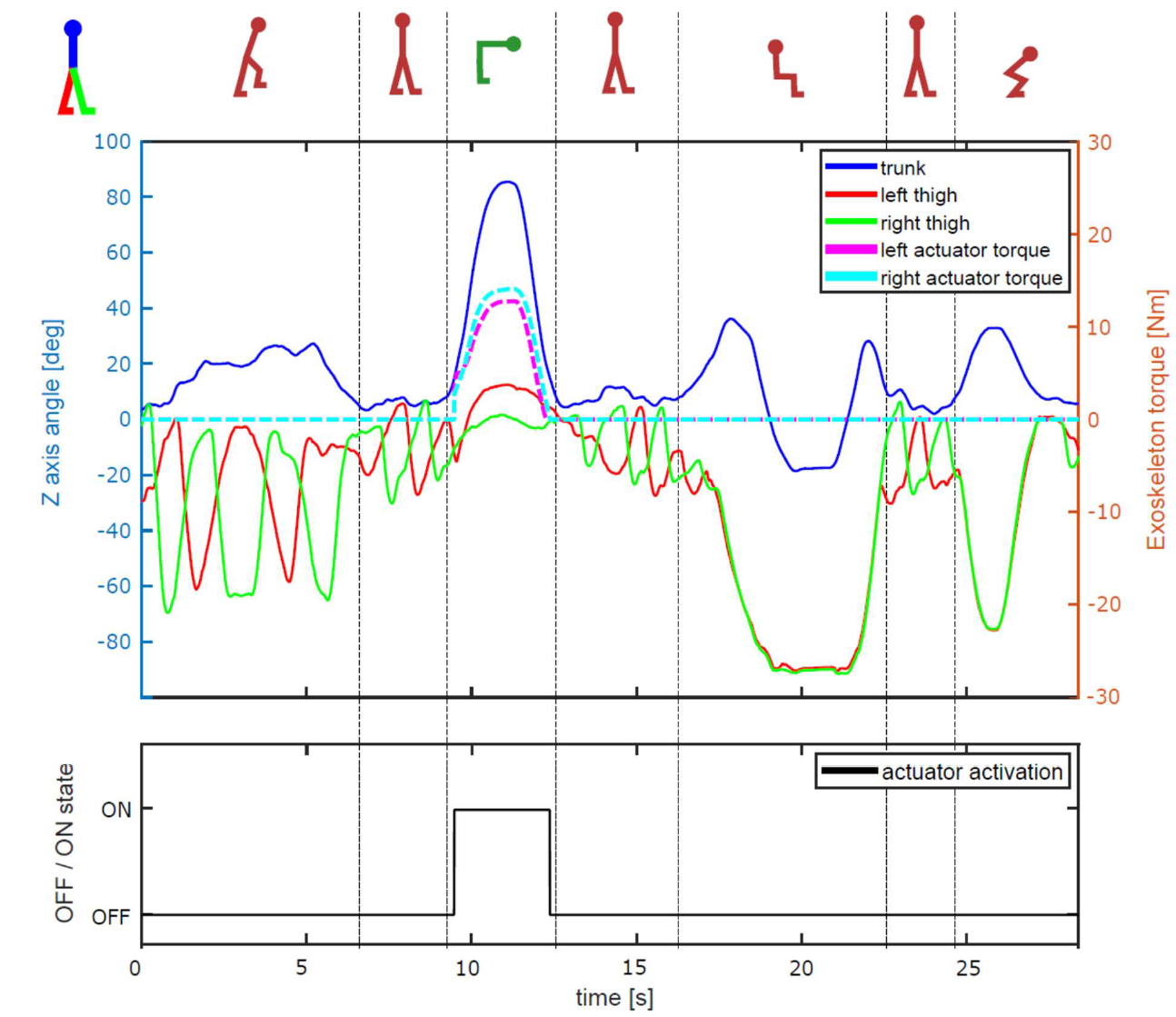
Controller for passive spinal exoskeleton
The controller for engagement and disengagement of the hip spring is developed. It is based on the probabilistic model of the human motion that classifies whether the user requires the support of the exoskeleton or the exoskeleton should remain disengaged to allow free motion.