Optimization-based control concepts for active exoskeletons
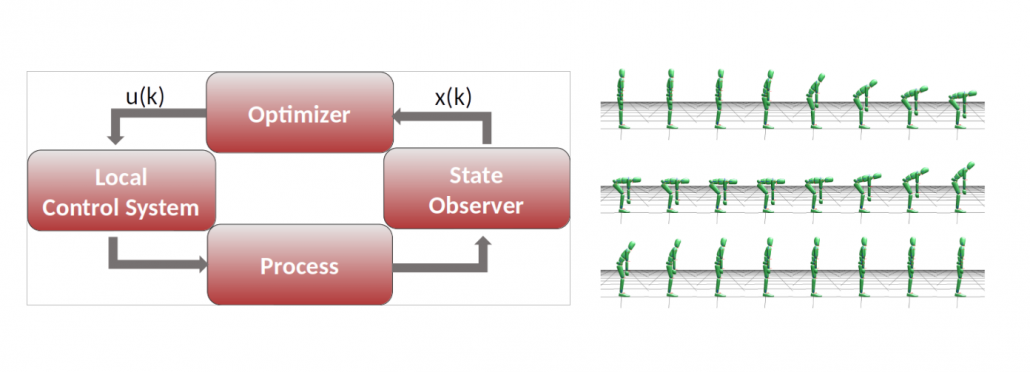
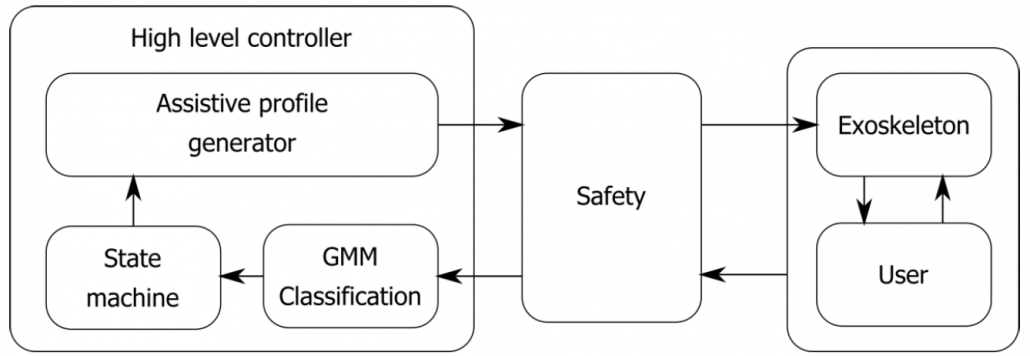
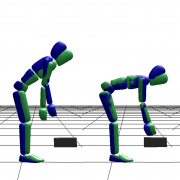
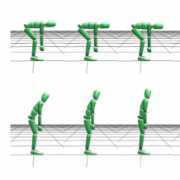
Producing cutting edge, state-of-the-art technology in the wearable robotics field is always limited by our abilities to use and exploit the multifunctional components that an active exoskeleton like SPEXOR features. To this extend, we use Optimal Control methods in a two-fold methodology: Firstly, we produce target torque profiles as to successfully drive the hip actuator incorporated in the exoskeleton in order to provide optimal support throughout motions of bending and lifting heavy objects. Consequently, we would like to know when and how to control these actuators through the computed optimal support profiles. Secondly, we compute optimal control strategies based on nonlinear model predictive control for active spinal exoskeletons by optimizing for certain prediction horizon during the operation of the system. Hence, we are able to control the motors as to produce the desired torques which can be optimized online for specific tasks and estimate the state of the human. In this manner we bridge the gaps between high- to low-level controls and can successfully drive the exoskeleton.