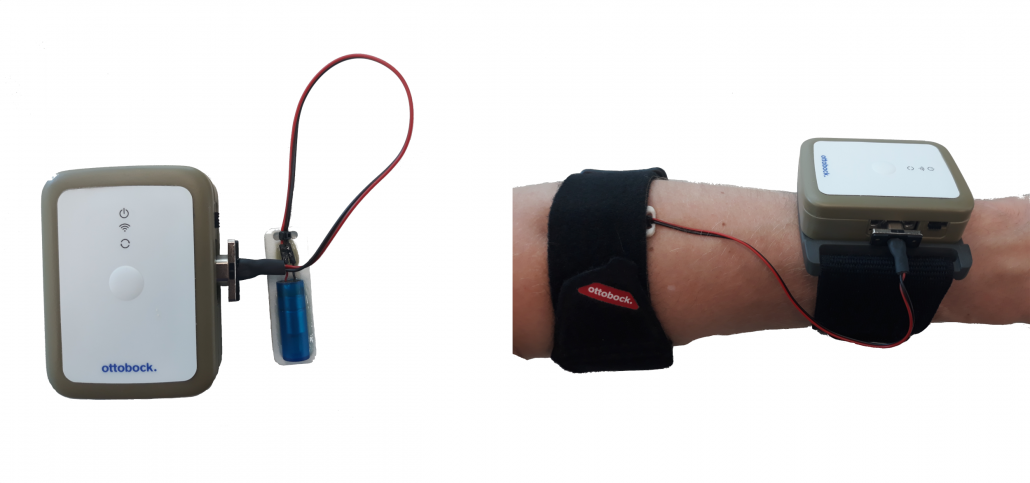
Spexor Monitoring system with sensory feedback capabilities
The Spexor Monitoring system fuses the sensor information from inertial measurement units (IMU) and force insoles to allow a biomechanical and ergonomical analysis of posture. The system can recognize when the user is doing an unergonomic movement and feedback this back to the user. This way the user can correct the posture or avoid such movements in the future.