
SPEXOR: Wearable technology to prevent lower back pain
A blog post was just published at the European Commission’s Digital Single Market.
A blog post was just published at the European Commission’s Digital Single Market.

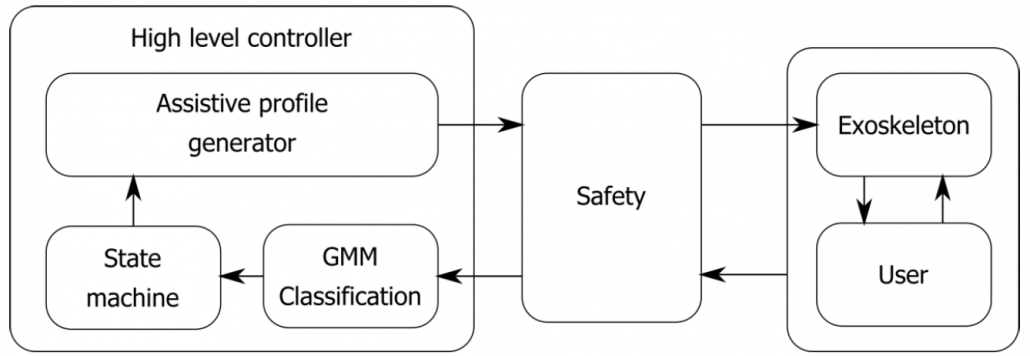
Based on the probabilistic state classifiers the high-level controller determines the appropriate assistive torque profile. The assistive torque profile is the resulting combination of a passive and active torque source.
A short documentary on the work and achievements of Spexor was recently produced by Euronews. Here is the video: